Model Loading
Up to this point, we've been creating our models manually. While this is an acceptable way to do this, it's really slow if we want to include complex models with lots of polygons. Because of this, we're going to modify our code to leverage the .obj model format so that we can create a model in software such as Blender and display it in our code.
Our lib.rs file is getting pretty cluttered. Let's create a model.rs file into which we can put our model loading code.
// model.rs
pub trait Vertex {
fn desc() -> wgpu::VertexBufferLayout<'static>;
}
#[repr(C)]
#[derive(Copy, Clone, Debug, bytemuck::Pod, bytemuck::Zeroable)]
pub struct ModelVertex {
pub position: [f32; 3],
pub tex_coords: [f32; 2],
pub normal: [f32; 3],
}
impl Vertex for ModelVertex {
fn desc() -> wgpu::VertexBufferLayout<'static> {
todo!();
}
}
You'll notice a couple of things here. In lib.rs, we had Vertex as a struct, but here we're using a trait. We could have multiple vertex types (model, UI, instance data, etc.). Making Vertex a trait will allow us to abstract out the VertexBufferLayout creation code to make creating RenderPipelines simpler.
Another thing to mention is the normal field in ModelVertex. We won't use this until we talk about lighting, but will add it to the struct for now.
Let's define our VertexBufferLayout.
impl Vertex for ModelVertex {
fn desc() -> wgpu::VertexBufferLayout<'static> {
use std::mem;
wgpu::VertexBufferLayout {
array_stride: mem::size_of::<ModelVertex>() as wgpu::BufferAddress,
step_mode: wgpu::VertexStepMode::Vertex,
attributes: &[
wgpu::VertexAttribute {
offset: 0,
shader_location: 0,
format: wgpu::VertexFormat::Float32x3,
},
wgpu::VertexAttribute {
offset: mem::size_of::<[f32; 3]>() as wgpu::BufferAddress,
shader_location: 1,
format: wgpu::VertexFormat::Float32x2,
},
wgpu::VertexAttribute {
offset: mem::size_of::<[f32; 5]>() as wgpu::BufferAddress,
shader_location: 2,
format: wgpu::VertexFormat::Float32x3,
},
],
}
}
}
This is basically the same as the original VertexBufferLayout, but we added a VertexAttribute for the normal. Remove the Vertex struct in lib.rs as we won't need it anymore, and use our new Vertex from model for the RenderPipeline.
We will also remove our homemade vertex_buffer, index_buffer and num_indices.
let render_pipeline = device.create_render_pipeline(&wgpu::RenderPipelineDescriptor {
// ...
vertex: wgpu::VertexState {
// ...
buffers: &[Some(model::ModelVertex::desc()), Some(InstanceRaw::desc())],
},
// ...
});
Since the desc method is implemented on the Vertex trait, the trait needs to be imported before the method will be accessible. Put the import towards the top of the file with the others.
use model::Vertex;
With all that in place, we need a model to render. If you have one already, that's great, but I've supplied a zip file with the model and all of its textures. We're going to put this model in a new res folder next to the existing src folder.
Accessing files in the res folder
When Cargo builds and runs our program, it sets what's known as the current working directory. This directory usually contains your project's root Cargo.toml. The path to our res folder may differ depending on the project's structure. In the res folder, the example code for this section tutorial is at code/beginner/tutorial9-models/res/. When loading our model, we could use this path and just append cube.obj. This is fine, but if we change our project's structure, our code will break.
We're going to fix that by modifying our build script to copy our res folder to where Cargo creates our executable, and we'll reference it from there. Create a file called build.rs and add the following:
use anyhow::*;
use fs_extra::copy_items;
use fs_extra::dir::CopyOptions;
use std::env;
fn main() -> Result<()> {
// This tells Cargo to rerun this script if something in /res/ changes.
println!("cargo:rerun-if-changed=res/*");
let out_dir = env::var("OUT_DIR")?;
let mut copy_options = CopyOptions::new();
copy_options.overwrite = true;
let mut paths_to_copy = Vec::new();
paths_to_copy.push("res/");
copy_items(&paths_to_copy, out_dir, ©_options)?;
Ok(())
}
You'll need to modify your Cargo.toml for this to work properly. Add the following below your [dependencies] block.
[build-dependencies]
anyhow = "1.0"
fs_extra = "1.2"
glob = "0.3"
Accessing files from WASM
By design, you can't access files on a user's filesystem in Web Assembly. Instead, we'll serve those files up using a web serve and then load those files into our code using an http request. In order to simplify this, let's create a file called resources.rs to handle this for us. We'll create two functions that load text and binary files, respectively.
use std::io::{BufReader, Cursor};
use wgpu::util::DeviceExt;
use crate::{model, texture};
#[cfg(target_arch = "wasm32")]
fn format_url(file_name: &str) -> reqwest::Url {
let window = web_sys::window().unwrap();
let location = window.location();
let mut origin = location.origin().unwrap();
if !origin.ends_with("learn-wgpu") {
origin = format!("{}/learn-wgpu", origin);
}
let base = reqwest::Url::parse(&format!("{}/", origin,)).unwrap();
base.join(file_name).unwrap()
}
pub async fn load_string(file_name: &str) -> anyhow::Result<String> {
#[cfg(target_arch = "wasm32")]
let txt = {
let url = format_url(file_name);
reqwest::get(url).await?.text().await?
};
#[cfg(not(target_arch = "wasm32"))]
let txt = {
let path = std::path::Path::new(env!("OUT_DIR"))
.join("res")
.join(file_name);
std::fs::read_to_string(path)?
};
Ok(txt)
}
pub async fn load_binary(file_name: &str) -> anyhow::Result<Vec<u8>> {
#[cfg(target_arch = "wasm32")]
let data = {
let url = format_url(file_name);
reqwest::get(url).await?.bytes().await?.to_vec()
};
#[cfg(not(target_arch = "wasm32"))]
let data = {
let path = std::path::Path::new(env!("OUT_DIR"))
.join("res")
.join(file_name);
std::fs::read(path)?
};
Ok(data)
}
I'm using reqwest to handle loading the requests when using WASM. Add the following to the Cargo.toml:
[target.'cfg(target_arch = "wasm32")'.dependencies]
# Other dependencies
reqwest = { version = "0.11" }
We'll also need to add the Location feature to web-sys:
web-sys = { version = "0.3", features = [
"Document",
"Window",
"Element",
"Location",
]}
Make sure to add resources as a module in lib.rs:
mod resources;
Loading models with TOBJ
We're going to use the tobj library to load our model. Let's add it to our Cargo.toml.
[dependencies]
# other dependencies...
tobj = { version = "3.2", default-features = false, features = ["async"]}
Before we can load our model, though, we need somewhere to put it.
// model.rs
pub struct Model {
pub meshes: Vec<Mesh>,
pub materials: Vec<Material>,
}
You'll notice that our Model struct has a Vec for the meshes and materials. This is important as our obj file can include multiple meshes and materials. We still need to create the Mesh and Material classes, so let's do that.
pub struct Material {
pub name: String,
pub diffuse_texture: texture::Texture,
pub bind_group: wgpu::BindGroup,
}
pub struct Mesh {
pub name: String,
pub vertex_buffer: wgpu::Buffer,
pub index_buffer: wgpu::Buffer,
pub num_elements: u32,
pub material: usize,
}
The Material is pretty simple. It's just the name and one texture. Our cube obj actually has two textures, but one is a normal map, and we'll get to those later. The name is more for debugging purposes.
Speaking of textures, we'll need to add a function to load a Texture in resources.rs.
pub async fn load_texture(
file_name: &str,
device: &wgpu::Device,
queue: &wgpu::Queue,
) -> anyhow::Result<texture::Texture> {
let data = load_binary(file_name).await?;
texture::Texture::from_bytes(device, queue, &data, file_name)
}
The load_texture method will be useful when we load the textures for our models, as include_bytes! requires that we know the name of the file at compile time, which we can't really guarantee with model textures.
Mesh holds a vertex buffer, an index buffer, and the number of indices in the mesh. We're using an usize for the material. This usize will index the materials list when it comes time to draw.
With all that out of the way, we can get to loading our model.
pub async fn load_model(
file_name: &str,
device: &wgpu::Device,
queue: &wgpu::Queue,
layout: &wgpu::BindGroupLayout,
) -> anyhow::Result<model::Model> {
let obj_text = load_string(file_name).await?;
let obj_cursor = Cursor::new(obj_text);
let mut obj_reader = BufReader::new(obj_cursor);
let (models, obj_materials) = tobj::load_obj_buf_async(
&mut obj_reader,
&tobj::LoadOptions {
triangulate: true,
single_index: true,
..Default::default()
},
|p| async move {
let mat_text = load_string(&p).await.unwrap();
tobj::load_mtl_buf(&mut BufReader::new(Cursor::new(mat_text)))
},
)
.await?;
let mut materials = Vec::new();
for m in obj_materials? {
let diffuse_texture = load_texture(&m.diffuse_texture, device, queue).await?;
let bind_group = device.create_bind_group(&wgpu::BindGroupDescriptor {
layout,
entries: &[
wgpu::BindGroupEntry {
binding: 0,
resource: wgpu::BindingResource::TextureView(&diffuse_texture.view),
},
wgpu::BindGroupEntry {
binding: 1,
resource: wgpu::BindingResource::Sampler(&diffuse_texture.sampler),
},
],
label: None,
});
materials.push(model::Material {
name: m.name,
diffuse_texture,
bind_group,
})
}
let meshes = models
.into_iter()
.map(|m| {
let vertices = (0..m.mesh.positions.len() / 3)
.map(|i| {
if m.mesh.normals.is_empty(){
model::ModelVertex {
position: [
m.mesh.positions[i * 3],
m.mesh.positions[i * 3 + 1],
m.mesh.positions[i * 3 + 2],
],
tex_coords: [m.mesh.texcoords[i * 2], 1.0 - m.mesh.texcoords[i * 2 + 1]],
normal: [0.0, 0.0, 0.0],
}
}else{
model::ModelVertex {
position: [
m.mesh.positions[i * 3],
m.mesh.positions[i * 3 + 1],
m.mesh.positions[i * 3 + 2],
],
tex_coords: [m.mesh.texcoords[i * 2], 1.0 - m.mesh.texcoords[i * 2 + 1]],
normal: [
m.mesh.normals[i * 3],
m.mesh.normals[i * 3 + 1],
m.mesh.normals[i * 3 + 2],
],
}
}
})
.collect::<Vec<_>>();
let vertex_buffer = device.create_buffer_init(&wgpu::util::BufferInitDescriptor {
label: Some(&format!("{:?} Vertex Buffer", file_name)),
contents: bytemuck::cast_slice(&vertices),
usage: wgpu::BufferUsages::VERTEX,
});
let index_buffer = device.create_buffer_init(&wgpu::util::BufferInitDescriptor {
label: Some(&format!("{:?} Index Buffer", file_name)),
contents: bytemuck::cast_slice(&m.mesh.indices),
usage: wgpu::BufferUsages::INDEX,
});
model::Mesh {
name: file_name.to_string(),
vertex_buffer,
index_buffer,
num_elements: m.mesh.indices.len() as u32,
material: m.mesh.material_id.unwrap_or(0),
}
})
.collect::<Vec<_>>();
Ok(model::Model { meshes, materials })
}
Rendering a mesh
Before we can draw the model, we need to be able to draw an individual mesh. Let's create a trait called DrawModel and implement it for RenderPass.
// model.rs
pub trait DrawModel<'a> {
fn draw_mesh(&mut self, mesh: &'a Mesh);
fn draw_mesh_instanced(
&mut self,
mesh: &'a Mesh,
instances: Range<u32>,
);
}
impl<'a, 'b> DrawModel<'b> for wgpu::RenderPass<'a>
where
'b: 'a,
{
fn draw_mesh(&mut self, mesh: &'b Mesh) {
self.draw_mesh_instanced(mesh, 0..1);
}
fn draw_mesh_instanced(
&mut self,
mesh: &'b Mesh,
instances: Range<u32>,
){
self.set_vertex_buffer(0, mesh.vertex_buffer.slice(..));
self.set_index_buffer(mesh.index_buffer.slice(..), wgpu::IndexFormat::Uint32);
self.draw_indexed(0..mesh.num_elements, 0, instances);
}
}
We could have put these methods in an impl Model, but I felt it made more sense to have the RenderPass do all the rendering, as that's kind of its job. This does mean we have to import DrawModel when we go to render, though.
When we removed vertex_buffer, etc., we also removed their render_pass setup.
// lib.rs
render_pass.set_vertex_buffer(1, self.instance_buffer.slice(..));
render_pass.set_pipeline(&self.render_pipeline);
render_pass.set_bind_group(0, &self.diffuse_bind_group, &[]);
render_pass.set_bind_group(1, &self.camera_bind_group, &[]);
use model::DrawModel;
render_pass.draw_mesh_instanced(&self.obj_model.meshes[0], 0..self.instances.len() as u32);
Before that, though, we need to load the model and save it to State. Put the following in State::new().
let obj_model =
resources::load_model("cube.obj", &device, &queue, &texture_bind_group_layout)
.await
.unwrap();
Our new model is a bit bigger than our previous one, so we're gonna need to adjust the spacing on our instances a bit.
const SPACE_BETWEEN: f32 = 3.0;
let instances = (0..NUM_INSTANCES_PER_ROW).flat_map(|z| {
(0..NUM_INSTANCES_PER_ROW).map(move |x| {
let x = SPACE_BETWEEN * (x as f32 - NUM_INSTANCES_PER_ROW as f32 / 2.0);
let z = SPACE_BETWEEN * (z as f32 - NUM_INSTANCES_PER_ROW as f32 / 2.0);
let position = cgmath::Vector3 { x, y: 0.0, z };
let rotation = if position.is_zero() {
cgmath::Quaternion::from_axis_angle(cgmath::Vector3::unit_z(), cgmath::Deg(0.0))
} else {
cgmath::Quaternion::from_axis_angle(position.normalize(), cgmath::Deg(45.0))
};
Instance {
position, rotation,
}
})
}).collect::<Vec<_>>();
With all that done, you should get something like this.
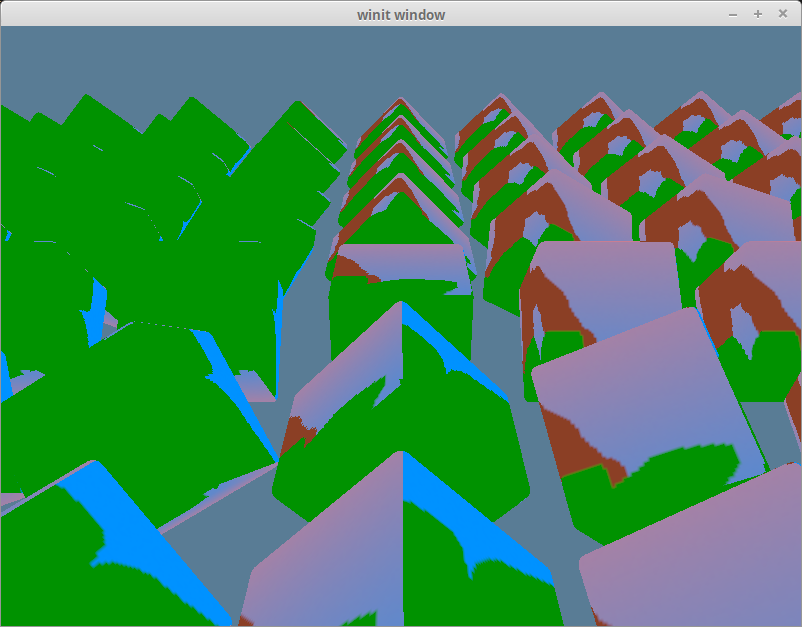
Using the correct textures
If you look at the texture files for our obj, you'll see that they don't match up to our obj. The texture we want to see is this one,

but we're still getting our happy tree texture.
The reason for this is quite simple. Though we've created our textures, we haven't created a bind group to give to the RenderPass. We're still using our old diffuse_bind_group. If we want to change that, we need to use the bind group from our materials - the bind_group member of the Material struct.
We're going to add a material parameter to DrawModel.
pub trait DrawModel<'a> {
fn draw_mesh(&mut self, mesh: &'a Mesh, material: &'a Material, camera_bind_group: &'a wgpu::BindGroup);
fn draw_mesh_instanced(
&mut self,
mesh: &'a Mesh,
material: &'a Material,
instances: Range<u32>,
camera_bind_group: &'a wgpu::BindGroup,
);
}
impl<'a, 'b> DrawModel<'b> for wgpu::RenderPass<'a>
where
'b: 'a,
{
fn draw_mesh(&mut self, mesh: &'b Mesh, material: &'b Material, camera_bind_group: &'b wgpu::BindGroup) {
self.draw_mesh_instanced(mesh, material, 0..1, camera_bind_group);
}
fn draw_mesh_instanced(
&mut self,
mesh: &'b Mesh,
material: &'b Material,
instances: Range<u32>,
camera_bind_group: &'b wgpu::BindGroup,
) {
self.set_vertex_buffer(0, mesh.vertex_buffer.slice(..));
self.set_index_buffer(mesh.index_buffer.slice(..), wgpu::IndexFormat::Uint32);
self.set_bind_group(0, &material.bind_group, &[]);
self.set_bind_group(1, camera_bind_group, &[]);
self.draw_indexed(0..mesh.num_elements, 0, instances);
}
}
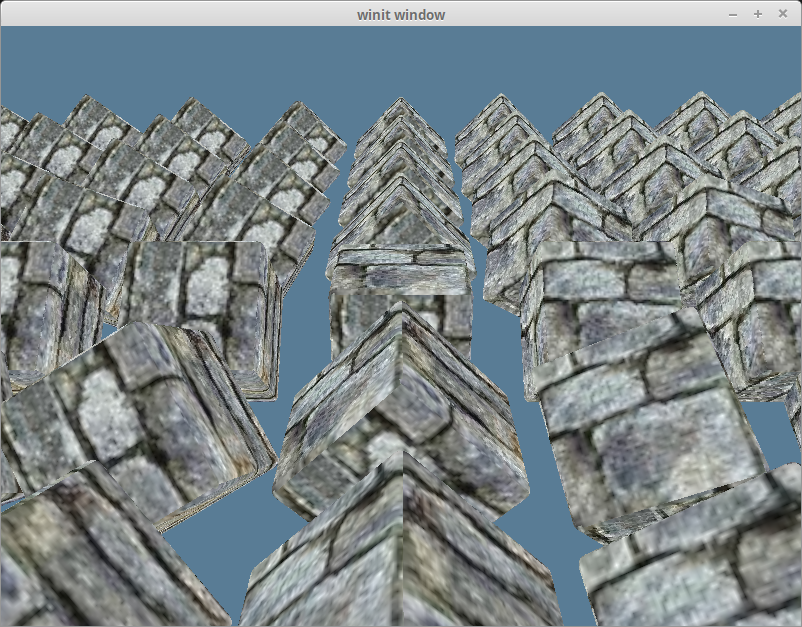
We need to change the render code to reflect this.
render_pass.set_vertex_buffer(1, self.instance_buffer.slice(..));
render_pass.set_pipeline(&self.render_pipeline);
let mesh = &self.obj_model.meshes[0];
let material = &self.obj_model.materials[mesh.material];
render_pass.draw_mesh_instanced(mesh, material, 0..self.instances.len() as u32, &self.camera_bind_group);
With all that in place, we should get the following.
Rendering the entire model
Right now, we are specifying the mesh and the material directly. This is useful if we want to draw a mesh with a different material. We're also not rendering other parts of the model (if we had some). Let's create a method for DrawModel that will draw all the parts of the model with their respective materials.
pub trait DrawModel<'a> {
// ...
fn draw_model(&mut self, model: &'a Model, camera_bind_group: &'a wgpu::BindGroup);
fn draw_model_instanced(
&mut self,
model: &'a Model,
instances: Range<u32>,
camera_bind_group: &'a wgpu::BindGroup,
);
}
impl<'a, 'b> DrawModel<'b> for wgpu::RenderPass<'a>
where
'b: 'a, {
// ...
fn draw_model(&mut self, model: &'b Model, camera_bind_group: &'b wgpu::BindGroup) {
self.draw_model_instanced(model, 0..1, camera_bind_group);
}
fn draw_model_instanced(
&mut self,
model: &'b Model,
instances: Range<u32>,
camera_bind_group: &'b wgpu::BindGroup,
) {
for mesh in &model.meshes {
let material = &model.materials[mesh.material];
self.draw_mesh_instanced(mesh, material, instances.clone(), camera_bind_group);
}
}
}
The code in lib.rs will change accordingly.
render_pass.set_vertex_buffer(1, self.instance_buffer.slice(..));
render_pass.set_pipeline(&self.render_pipeline);
render_pass.draw_model_instanced(&self.obj_model, 0..self.instances.len() as u32, &self.camera_bind_group);